The implementation of Feedforward-feedback Loop-based Visual Inertial System. If you want to use FLVIS with GPU acceleration, try this repo.
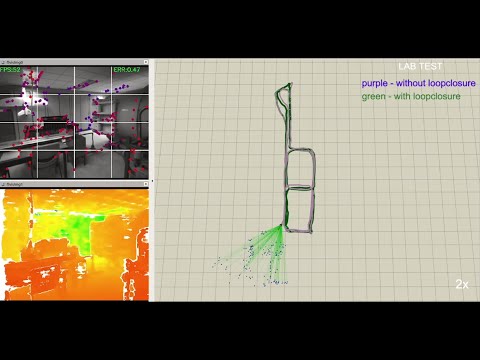
| EuRoC DataSet MH_05 | Handheld Test in Lab | FlVIS on UAV Platform |
|---|---|---|
 |
 |
 |
Stereo Visual Inertial Pose Estimation Based on Feedforward and Feedbacks
Intel RealSense D435i Camera
EuRoC MAV Dataset
If you do not want to do a lotta prequisite setting, you can use Docker.
Else...Do this
We have tested in the following environment:
Ubuntu 16.04 + ROS Kinetic
Ubuntu 18.04 + ROS melodic
Ubuntu 20.04 + ROS noetic
Clone the repository to the catkin work space eg. /catkin_ws/src
git clone https://github.com/HKPolyU-UAV/FLVIS.git
Install 3rd Part library
cd catkin_ws/src/FLVIS/3rdPartLib/
./install3rdPartLib.sh
Compile
cd ~/catkin_ws
catkin_make
Support Platform D435i(Depth/Stereo Mode), EuRoC Dataset, KITTI Dataset
Download the dataset Link-melab_sn943222072828.bag to /bag folder
Decompress the rosbag:
rosbag decompress melab_sn943222072828.bag
run the following launch files:
roslaunch flvis rviz_bag.launch
roslaunch flvis flvis_bag.launch
Install the realsense driver and its ros wrapper
Boot the d435i camera and echo the camera infomation
roslaunch flvis d435i_depth.launch
rostopic echo /camera/infra1/camera_info
You will get the camera infomation like:
 As shown, where the resolution is 640x480 and
As shown, where the resolution is 640x480 and fx=384.16455078125; fy=384.16455078125; cx=320.2144470214844;cy=238.94403076171875.
Edit these information in the config yaml file (say: /launch/d435i/sn943222072828_depth.yaml):
image_width: 640
image_height: 480
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2In the launch file flvis_d435i.launch, make sure /yamlconfigfile is point to the edited config file
<param name="/yamlconfigfile" type="string" value="$(find flvis)/launch/d435i/sn943222072828_depth.yaml"/>
run the following launch files:
roslaunch flvis rviz_bag.launch
roslaunch flvis flvis_d435i_depth.launch
Like what we did in 5.1.2, we need to config the sn943222072828_stereo.yaml
Note that, by default the two camera share the same intrinsic parameters, and the baseline length is 0.05m:
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
cam1_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam1_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
T_cam0_cam1:
[ 1.0, 0.0, 0.0, 0.05,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0]
We also support fusing any Inertial Measurement Unit (IMU), and stereo camera or depth camera. For example, a very common application is running VIO on quadrotors to estimate its own pose by IMU readings from Pixhawk. We need to config the catkin_ws/FLVIS/launch/d435_pixhawk/sn841512070537_depth_px4.yaml or catkin_ws/FLVIS/launch/d435_pixhawk/sn943222072828_stereo_px4.yaml
run the following launch files:
roslaunch flvis flvis_d435_pixhawk_depth.launch
or
roslaunch flvis flvis_d435_pixhawk_stereo.launch
Check your mavros status by:
rostopic echo /mavros/imu/data
If IMU response normally, then open a new terminal, and check by:
rostopic echo /mavros/local_position/pose
Download the dataset(say MH_05_difficult) into the bag folder:
roscd flvis/bag/
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_05_difficult/MH_05_difficult.bag
Edit the corresponding bag name in flvis_euroc_mav.launch file:
<node pkg="rosbag" type="play" name="rosbag" args="$(find flvis)/bag/MH_05_difficult.bag"/>
run the following launch files:
roslaunch flvis rviz_euroc.launch
roslaunch flvis flvis_euroc_mav.launch
Download the dataset into the bag folder:

Decompress poses.zip file and edit the corresponding bag name in flvis_kitti.launch file:
<param name="/publish_gt" type="bool" value="true" />
<param name="/dataset_folder_path" type="string" value="$(find flvis)/bag/KITTI/dataset/sequences/00/" />
<param name="/dataset_gt_file" type="string" value="$(find flvis)/bag/KITTI/dataset/poses/00.txt" />
run the following launch files:
roslaunch flvis rviz_kitti.launch
roslaunch flvis flvis_kitti.launch
If tracking failure or optimize failure happen, please try a lower dataset publish rate 10 or 15 instead:
<param name="/dataset_pub_rate" type="int" value="15" />
Shengyang Chen(Dept.ME,PolyU): shengyang.chen@connect.polyu.hk
Yurong Feng(Dept.AAE,PolyU): yu-rong.feng@connect.polyu.hk
Yajing Zou(Dept.LSGI,PolyU):rick.zou@connect.polyu.hk