A rubiks cube timer using a distance sensor and a raspberry pi 4, and possibly the pi pico to reduce size and cost. It has all the base features i want to add the timer, it still only works on the raspberry pi with the distance sensor which can be coded to work with other things if it outputs True and False to stop and start the timer.
It now Works on windows! kind of, it uses the enter key to start and stop the timer. it auto detects if you have the RPi.gpio module installed and runs and deletes necessary code if you dont have it.
- Make the timer start with any key you want(may need the GUI)
- Make a GUI
- Scramble generator - 3x3
- Update scramble generator for more WCA events
- Make timer.txt compatible with your cstimer sessions
to use the distance sensor as the input you need to run the command 'pip install RPi.gpio' in the terminal of the raspberry pi, or you will get an error. the code can run on anything that, so if you aren't using a raspberry pi, use an input method that doesn't use the pi's GPIO pins.
Download the folder 'distance-sensor-cube-timer' and run the python script 'timer' to start using the timer.
there is now a settings menu, to open it press Ctrl + c and it will open the menu, to choose an option type a number and press enter.
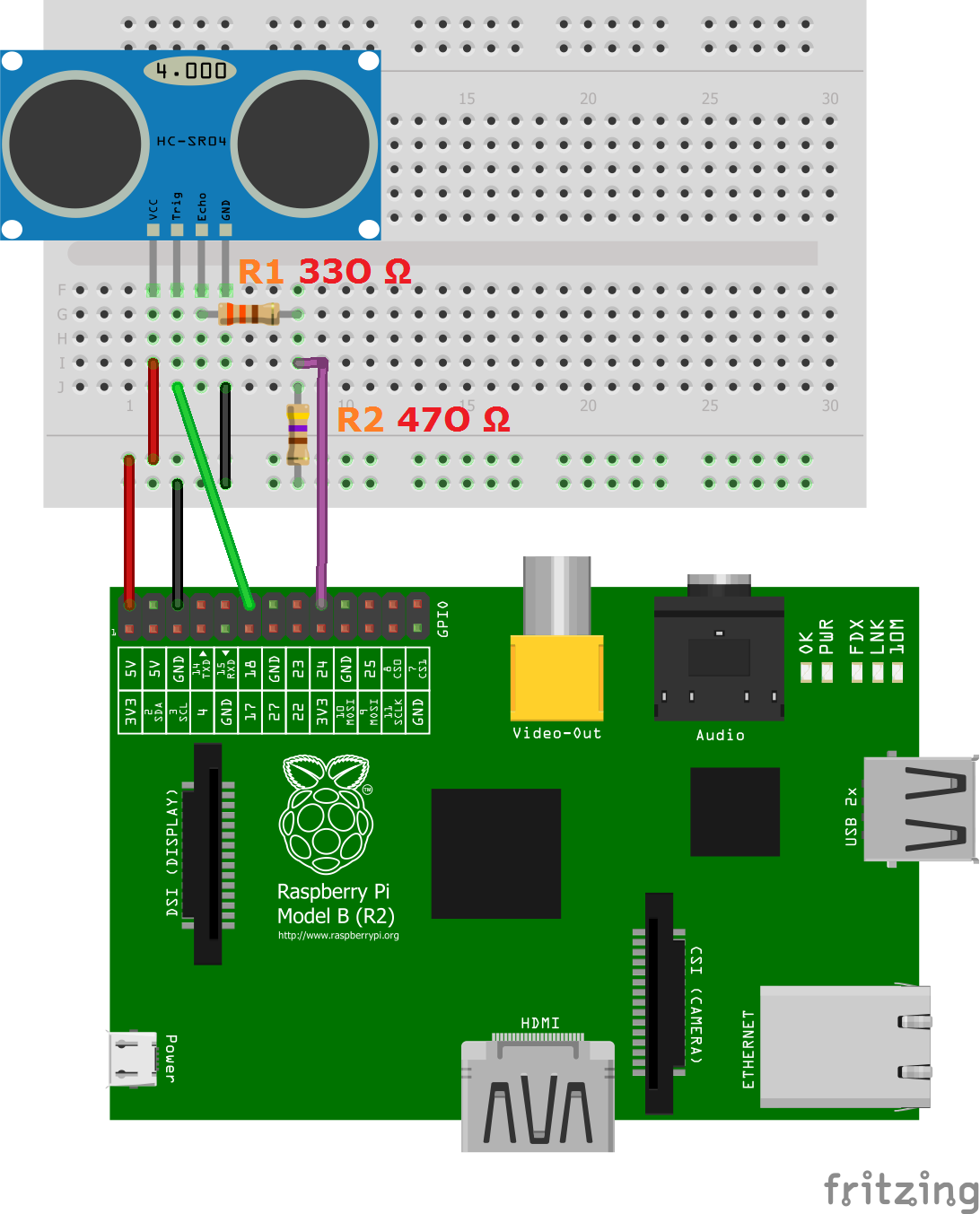
The electronics to make this consist of a raspberry pi 4 (I will be looking into using a pi pico), a bread board, jumper cables and a Distance sensor. Then follow the diagram below to connect the sensor to the pi.
All the times and averages will be stored in /distance-sensor-cube-timer/times.txt'.
you can edit the file 'config.py' to chnage the delay, activation distance and average size.
To start and stop the timer hold and object infront of the sensor, it must be within the distance set by 'config.py'in cm for it to register. hold the object infront of the sensor the amout of time set in 'config.py', when removed the timer will start, to stop the timer put and object back infront of the sensor, then repeat.
you can change the input method by impoorting another module, make sure it outputs True and False, for example, when there is something infront of the sensor it outputs True.
If you want to contribute to the project please follow these
- All variables must be written in snake case e.g. distance_sensor
- classes must be writen in camel case
- Please use double quotes for strings
- Make use of white sapce to make code more readable
- Comment where necessary to add clarification
This project uses semantic versioning