Rotate-Yolov5
This repository is based on Ultralytics/yolov5, with adjustments to enable rotate prediction boxes.
Section I. Description
The codes are based on Ultralytics/yolov5, and several functions are added and modified to enable rotate prediction boxes.
The modifications compared with Ultralytics/yolov5 and their brief descriptions are summarized below:
-
data/rotate_ucas.yaml : Exemplar UCAS-AOD dataset to test the effects of rotate boxes
-
data/images/UCAS-AOD : For the inference of rotate-yolov5s-ucas.pt
-
models/common.py :
3.1. class Rotate_NMS : Non-Maximum Suppression (NMS) module for Rotate Boxes
3.2. class Rotate_AutoShape : Rotate Version of Original AutoShape, input-robust polygon model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and Rotate_NMS
3.3. class Rotate_Detections : Rotate detections class for Rotate-YOLOv5 inference results -
models/rotate_yolov5s_ucas.yaml : Configuration file of rotate yolov5s for exemplar UCAS-AOD dataset
-
models/yolo.py :
5.1. class Rotate_Detect : Detect head for rotate-yolov5 models with rotate box prediction
5.2. class Rotate_Model : Rotate yolov5 models with rotate box prediction -
utils/iou_cuda : CUDA extension for iou computation of polygon boxes
6.1. extensions.cpp : CUDA extension file
6.2. inter_union_cuda.cu : CUDA code for computing iou of polygon boxes
6.3. setup.py : for building CUDA extensions module polygon_inter_union_cuda, with two functions polygon_inter_union_cuda and polygon_b_inter_union_cuda -
utils/autoanchor.py :
7.1. def rotate_check_anchors : Rotate version of original check_anchors
7.2. def rotate_kmean_anchors : Create kmeans-evolved anchors from rotate-enabled training dataset -
utils/datasets.py :
8.1. def polygon_random_perspective : Data augmentation for datasets with polygon boxes (augmentation effects: HSV-Hue, HSV-Saturation, HSV-Value, rotation, translation, scale, shear, perspective, flip up-down, flip left-right, mosaic, mixup)
8.2. def polygon_box_candidates : Polygon version of original box_candidates
8.3. def rotate_random_perspective : Data augmentation for datasets with rotate boxes (augmentation effects: HSV-Hue, HSV-Saturation, HSV-Value, rotation, translation, scale, shear, perspective, flip up-down, flip left-right, mosaic, mixup)
8.4. class Rotate_LoadImagesAndLabels : Rotate version of original LoadImagesAndLabels
8.5. def rotate_load_mosaic : Loads images in a 4-mosaic, with rotate boxes
8.6. def rotate_load_mosaic9 : Loads images in a 9-mosaic, with rotate boxes
8.7. def rotate_verify_image_label : Verify one image-label pair for rotate datasets
8.8. def create_dataloader : Has been modified to include rotate datasets
8.9. class Albumentations : For albumentation augmentation -
utils/general.py :
9.1. def xyxyxyxyn2xyxyxyxy : Convert normalized xyxyxyxy or segments into pixel xyxyxyxy or segments
9.2. def polygon_segment2box : Convert 1 segment label to 1 polygon box label
9.3. def polygon_inter_union_cpu : iou computation (polygon) with cpu
9.4. def polygon_box_iou : Compute iou of polygon boxes via cpu or cuda
9.5. def polygon_b_inter_union_cpu : iou computation (polygon) with cpu
9.6. def polygon_bbox_iou : Compute iou of polygon boxes via cpu or cuda
9.7. def polygon_nms_kernel : Non maximum suppression kernel for polygon-enabled boxes
9.8. def order_corners : Return sorted corners
9.9. def xywhrm2xyxyxyxy : Convert rotate xywhrm into xyxyxyxy, suitable for both pixel-level or normalized
9.10. def xyxyxyxy2xywhrm : Convert xyxyxyxy into rotate xywhrm, suitable for both pixel-level and normalized
9.11. def xywhn2xywh : Convert normalized xywh into pixel xywh
9.12. def rotate_segments2boxes : Convert segment labels to rotate box labels, i.e. (xy1, xy2, ...) to rotated boxes (x, y, w, h, re, im)
9.13. def rotate_scale_coords : Rescale coords (x, y, w, h, re, im) from img1_shape to img0_shape
9.14. def rotate_box_iou : Compute iou of rotate boxes via cpu or cuda
9.15. def rotate_bbox_iou : Compute iou of rotated boxes for class Rotate_ComputeLoss in loss.py via cpu or cuda
9.16. def rotate_non_max_suppression : Runs Non-Maximum Suppression (NMS) on inference results for rotated boxes -
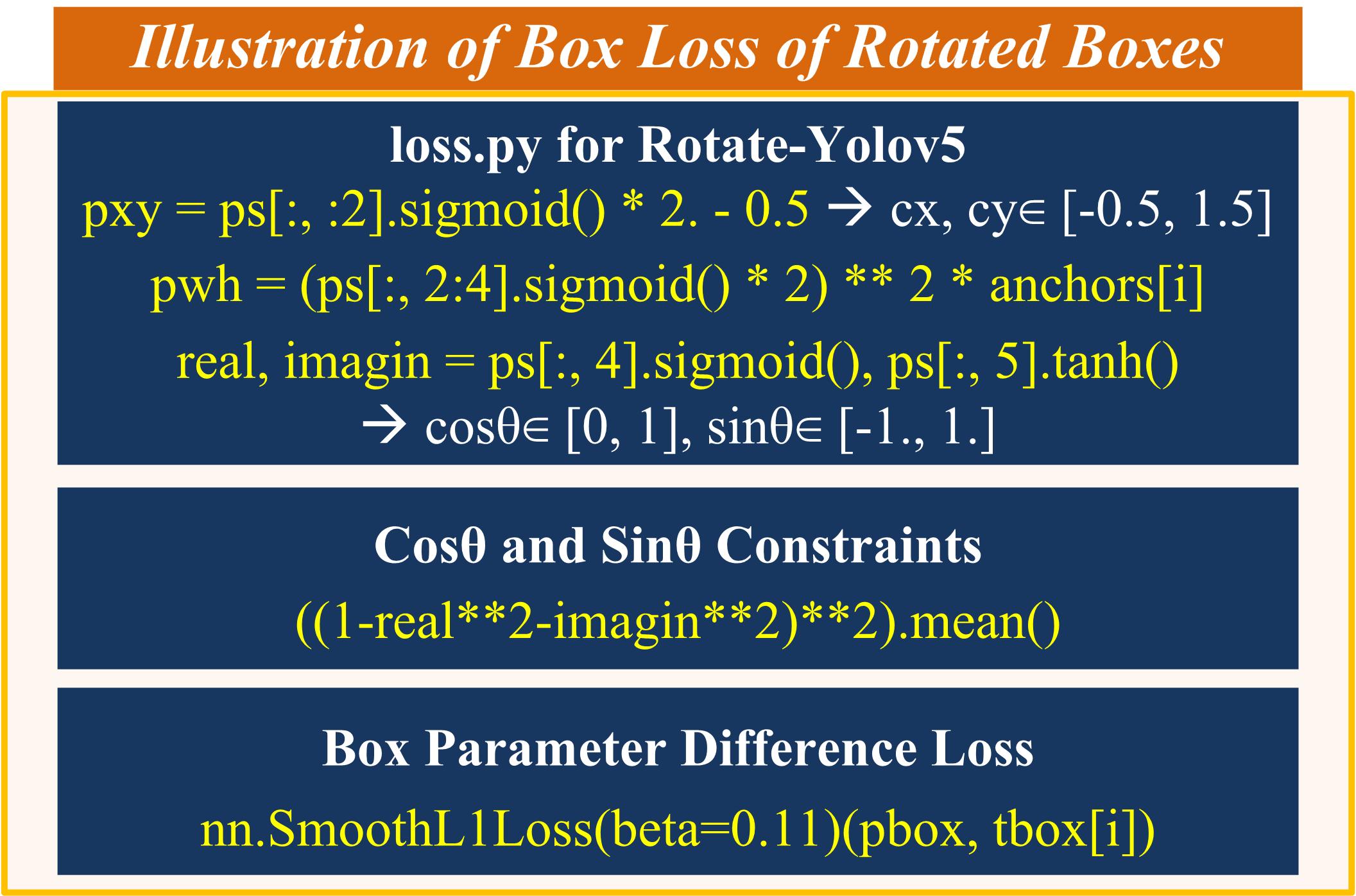
utils/loss.py :
10.1. class Rotate_ComputeLoss : Compute loss for rotate boxes -
utils/metrics.py :
11.1. class Rotate_ConfusionMatrix : Rotate version of original ConfusionMatrix -
utils/plots.py :
12.1. def polygon_plot_one_box : Plot one polygon box on image
12.2. def polygon_plot_one_box_PIL : Plot one polygon box on image via PIL
12.3. def polygon_plot_images : Polygon version of original plot_images
12.4. def rotate_plot_one_box : Plot one rotate box on image
12.5. def rotate_plot_one_box_PIL : Plot one rotate box on image via PIL
12.6. def rotate_output_to_target : Convert model output format [x, y, w, h, re, im, conf, class_id] to target format [batch_id, class_id, x, y, w, h, re, im, conf]
12.7. def rotate_plot_images : Rotate version of original plot_images
12.8. def rotate_plot_test_txt : Rotate version of original plot_test_txt
12.9. def rotate_plot_targets_txt : Rotate version of original plot_targets_txt
12.10. def rotate_plot_labels : Rotate version of original plot_labels -
rotate_train.py : For training rotate-yolov5 models
-
rotate_test.py : For testing rotate-yolov5 models
-
rotate_detect.py : For detecting rotate-yolov5 models
-
requirements.py : Added python model shapely
Section II. How Does Rotate Boxes Work? How Does Rotate Boxes Different from Polygon Boxes?
- Comparisons between Rotate-Yolov5 and Polygon-Yolov5


Section III. Installation
For the CUDA extension to be successfully built without error, please use CUDA version >= 11.2. The codes have been verified in Ubuntu 16.04 with Tesla K80 GPU.
# The following codes install CUDA 11.2 from scratch on Ubuntu 16.04, if you have installed it, please ignore # If you are using other versions of systems, please check https://tutorialforlinux.com/2019/12/01/how-to-add-cuda-repository-for-ubuntu-based-oses-2/ # Install Ubuntu kernel head sudo apt install linux-headers-$(uname -r)
# Pinning CUDA repo wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/cuda-ubuntu1604.pin sudo mv cuda-ubuntu1604.pin /etc/apt/preferences.d/cuda-repository-pin-600
# Add CUDA GPG key sudo apt-key adv --fetch-keys http://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/7fa2af80.pub
# Setting up CUDA repo sudo add-apt-repository "deb https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/ /"
# Refresh apt repositories sudo apt update
# Installing CUDA 11.2 sudo apt install cuda-11-2 -y sudo apt install cuda-toolkit-11-2 -y
# Setting up path echo 'export PATH=/usr/local/cuda-11.2/bin${PATH:+:${PATH}}' >> $HOME/.bashrc # You are done installing CUDA 11.2
# Check NVIDIA nvidia-smi # Update all apts sudo apt-get update sudo apt-get -y upgrade
# Begin installing python 3.7 curl -o ~/miniconda.sh -O https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh chmod +x ~/miniconda.sh ./miniconda.sh -b echo "PATH=~/miniconda3/bin:$PATH" >> ~/.bashrc source ~/.bashrc conda install -y python=3.7 # You are done installing python
The following codes set you up with the Rotate Yolov5.
# clone git repo git clone https://github.com/XinzeLee/RotateObjectDetection cd RotateObjectDetection/rotate-yolov5 # install python package requirements pip install -r requirements.txt # install CUDA extensions cd utils/iou_cuda python setup.py install # cd back to rotate-yolov5 folder cd .. && cd ..
Section IV. Rotate-Tutorial 1: Deploy the Rotate Yolov5s
Try Rotate Yolov5s Model by Following Rotate-Tutorial 1
- Inference
$ python rotate_detect.py --weights rotate-yolov5s-ucas.pt --img 1024 --conf 0.75 \ --source data/images/UCAS-AOD --iou-thres 0.4 --hide-labels
- Test
$ python rotate_test.py --weights rotate-yolov5s-ucas.pt --data rotate_ucas.yaml \ --img 1024 --iou 0.65 --task val
- Train
$ python rotate_train.py --weights rotate-yolov5s-ucas.pt --cfg rotate_yolov5s_ucas.yaml \ --data rotate_ucas.yaml --hyp hyp.ucas.yaml --img-size 1024 \ --epochs 3 --batch-size 12 --noautoanchor --rotate --cache - Performance
4.1. Confusion Matrix
4.2. Precision Curve
4.3. Recall Curve
4.4. Precision-Recall Curve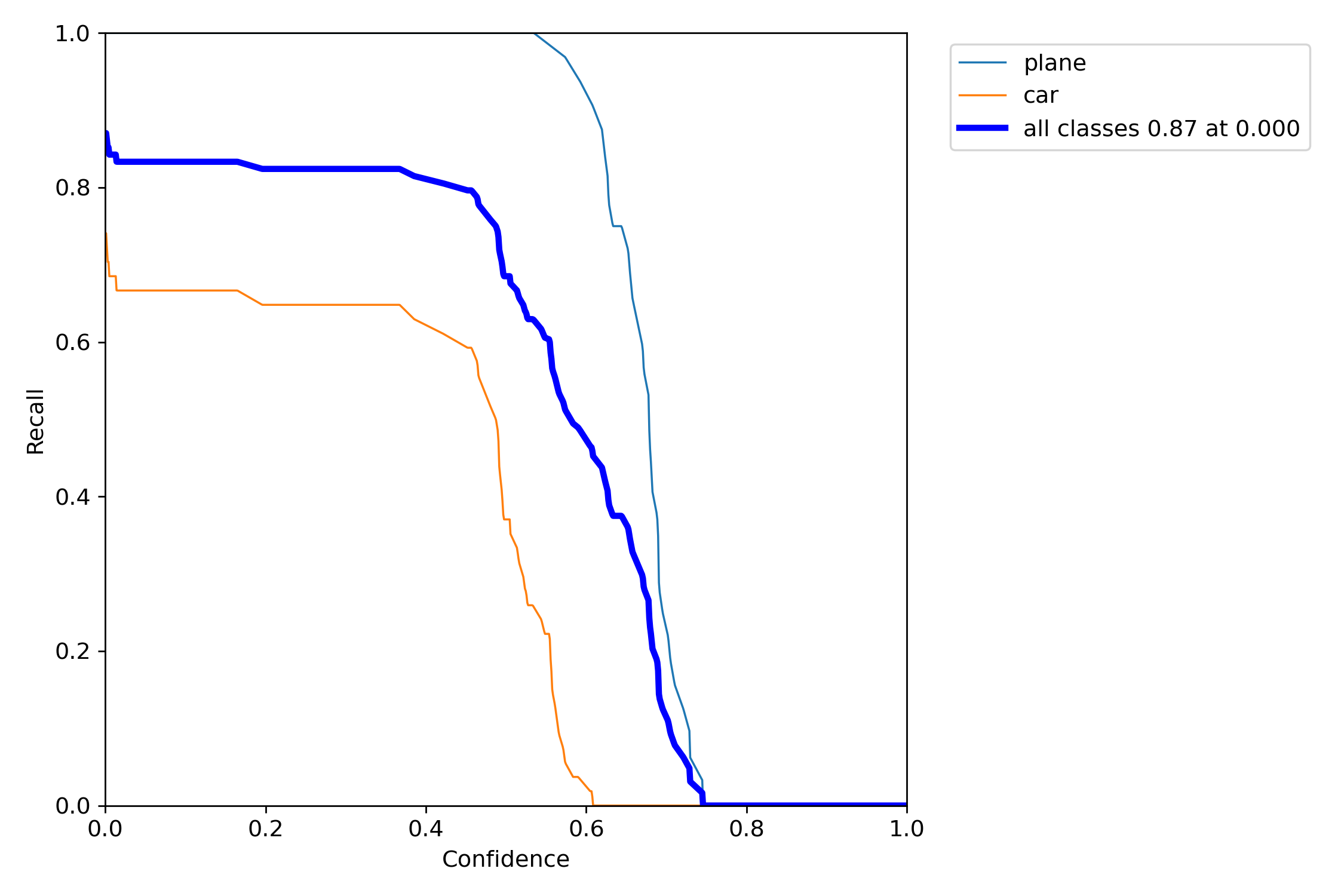
4.5. F1 Curve

Section V. Rotate-Tutorial 2: Transform COCO Dataset to Rotate Labels Using Segmentation
Transform COCO Dataset to Rotate Labels by Following Rotate-Tutorial 2






![Allowing full rotation [-180, 180]](https://avatars.githubusercontent.com/u/11805918?v=4)






 15 Nov 20, 2022
15 Nov 20, 2022
 120 Dec 24, 2022
120 Dec 24, 2022
 2 Mar 02, 2022
2 Mar 02, 2022
 2 Oct 11, 2022
2 Oct 11, 2022
 25 Dec 27, 2022
25 Dec 27, 2022
 166 Dec 22, 2022
166 Dec 22, 2022
 258 Jan 02, 2023
258 Jan 02, 2023
 107 Nov 04, 2022
107 Nov 04, 2022
 35 Jan 01, 2023
35 Jan 01, 2023
 9 May 24, 2022
9 May 24, 2022
 588 Dec 31, 2022
588 Dec 31, 2022
 22 Nov 25, 2022
22 Nov 25, 2022
 42 Sep 26, 2022
42 Sep 26, 2022
 24 May 20, 2022
24 May 20, 2022
 288 Oct 28, 2022
288 Oct 28, 2022
 6 Nov 14, 2022
6 Nov 14, 2022
 42 Jan 04, 2023
42 Jan 04, 2023
 4 Mar 17, 2022
4 Mar 17, 2022
 5 Oct 10, 2021
5 Oct 10, 2021
 30 Nov 19, 2022
30 Nov 19, 2022