robot_inverse_kinematics
Project setup
# put the package in the workspace
$ cd ~/catkin_ws/
$ catkin_make
$ source devel/setup.bash
Description
In this project, we program the inverse kinematic algorithm for a robot, which will move its joints so that it follows a desired path with the end-effector.
It is composed of two parts:
- A 3 DOF scara robot, with an inverse kinematic solution that is possible in analytic form.
- A 7 DOF kuka robot, with the inverse kinematic solution to be implemented with iterative algorithms.
Scara robot
The following image shows the distances between the joints and the end-effector frame, in the robot's zero configuration. Two joints (q1 and q2) are revolute, and one (q3) is prismatic. Notice that the end-effector frame and the base frame are at the same height, which means that the end-effector z coordinate coincides with the value of the last prismatic joint (q3).

Kuka robot
This robot has a kinematics structure much more complex than the scara, therefore it is not feasible to obtain an analytic solution for the inverse kinematics problem. The inputs to this function are:
point = (x, y, z), the desired position of the end-effector.R = 3x3rotation matrix, the desired orientation of the end-effector.joint_positions = (q1, q2, q3, q4, q5, q5, q7)the current joint positions.
The output of this function is a vector q containing the 7 joint values that give the desired pose of the end-effector.
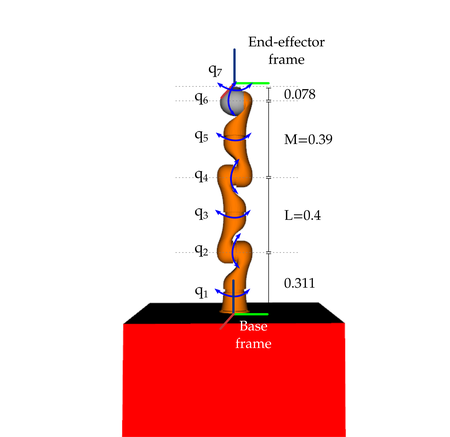
This is the DH table of the kuka robot, with the depicted frames:
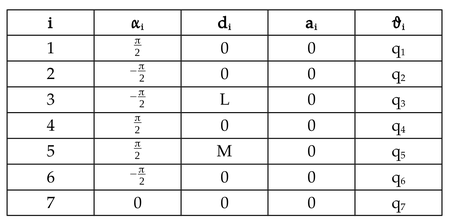
The DH table follows this convention:
a_idistance betweenz_i-1andz_ialong the axisx_ialpha_iangle betweenz_i-1andz_iabout the axisx_id_idistance betweenx_i-1andx_ialong the axisz_i-1theta_iangle betweenx_i-1andx_iabout the axisz_i-1
The frame transformation can be found as:

Pseudocode:
# initial guess
q_hat = q + eps_q
while eps_x > tolerance:
x_hat = K(q_hat)
eps_x = x_hat - x
eps_q = inv(J) @ q_hat @ eps_x
q_hat = q_hat - eps_q
Run the simulator
Scara robot
$ roslaunch kinematics_assignment scara_launch.launch
Kuka robot
$ roslaunch kinematics_assignment kuka_launch.launch
Simulation result (kuka)


 1 Jan 06, 2022
1 Jan 06, 2022
 297 Jan 06, 2023
297 Jan 06, 2023
 133 Jan 01, 2023
133 Jan 01, 2023
 1 Jan 08, 2022
1 Jan 08, 2022
 1 Feb 08, 2022
1 Feb 08, 2022
 12 Oct 06, 2022
12 Oct 06, 2022
 28 Dec 21, 2022
28 Dec 21, 2022
 645 Dec 25, 2022
645 Dec 25, 2022
 10 Dec 23, 2022
10 Dec 23, 2022
 1 Dec 17, 2021
1 Dec 17, 2021
 15 Dec 28, 2022
15 Dec 28, 2022
 1 Nov 30, 2021
1 Nov 30, 2021
 5 Nov 08, 2022
5 Nov 08, 2022
 6 Dec 13, 2022
6 Dec 13, 2022
 2.5k Jan 05, 2023
2.5k Jan 05, 2023
 45 Dec 15, 2022
45 Dec 15, 2022
 1k Dec 27, 2022
1k Dec 27, 2022
 3 Dec 19, 2021
3 Dec 19, 2021
 31 Jan 04, 2023
31 Jan 04, 2023
 2 Dec 06, 2021
2 Dec 06, 2021