Neural Scene Graphs for Dynamic Scene (CVPR 2021)
Project Page | Paper
Julian Ost, Fahim Mannan, Nils Thuerey, Julian Knodt, Felix Heide
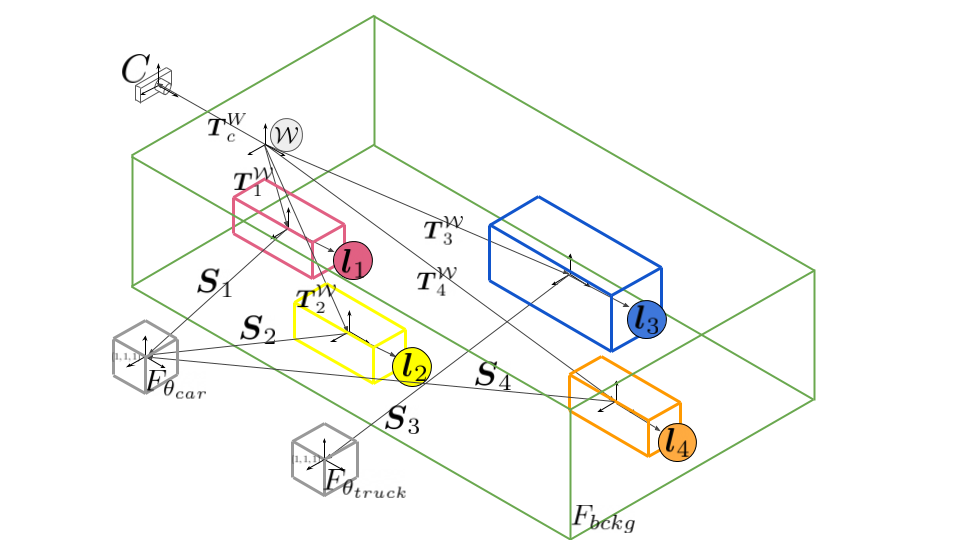
Implementation of Neural Scene Graphs, that optimizes multiple radiance fields to represent different objects and a static scene background. Learned representations can be rendered with novel object compositions and views.
Original repository forked from the Implementation of "NeRF: Neural Radiance Fields" by Mildenhall et al.: Original NeRF Implementation, original readme
Getting started
The whole script is currently optimized for the usage with Virtual KITTI 2 Dataset and KITTI
Quick Start
Train a Virtual KITTI 2 Scene
conda create -n neural_scene_graphs --file requirements.txt -c conda-forge -c menpo
conda activate neural_scene_graphs
cd neural-scene-graphs
bash download_virtual_kitti.sh
python main.py --config example_configs/config_vkitti2_Scene06.py
tensorboard --logdir=example_weights/summaries --port=6006
Render a pretrained KITTI Scene from a trained Scene Graph Models
Follow the instructions under data preparation to setup the KITTI dataset.
conda create -n neural_scene_graphs --file requirements.txt -c conda-forge -c menpo
conda activate neural_scene_graphs
cd neural-scene-graphs
bash download_weights_kitti.sh
python main.py --config example_configs/config_kitti_0006_example_render.py
tensorboard --logdir=example_weights/summaries --port=6006
Disclaimer: The codebase is optimized to run on larger GPU servers with a lot of free CPU memory. To test on local and low memory,
- Use chunk and netchunk in the config files to limit parallel computed rays and sampling points.
or
- resize and retrain with
--training_factor = 'downsampling factor'
or change to the desired factor in your config file.
Data Preperation
KITTI
- Get the KITTI MOT dataset, from which you need:
- Extract everything to
./data/kittiand keep the data structure - Neural Scene Graphs is well tested and published on real front-facing scenarios with only small movements along the camera viewing direction. We therefore prepared selected config files for KITTI Scenes (0001, 0002, 0006)
Virtual KITTI 2
bash ./download_virtual_kitti.sh
Training
To optimize models on a subsequence of Virtual KITTI 2 or KITTI, create the environment, download the data set (1.2) and optimize the (pre-trained) background and object models together:
conda create -n neural_scene_graphs --file requirements.txt -c conda-forge -c menpo
conda activate neural_scene_graphs
vkitti2 example:
python main.py --config example_configs/config_vkitti2_Scene06.txt
tensorboard --logdir=example_weights/summaries --port=6006
KITTI example:
python main.py --config example_configs/config_kitti_0006_example_train.txt
tensorboard --logdir=example_weights/summaries --port=6006
Rendering a Sequence
Render a pretrained KITTI sequence
bash download_weights_kitti.sh
python main.py --config example_configs/config_kitti_0006_example_render.txt
To render a pre-trained download the weights or use your own model.
bash download_weights_kitti.sh
To make a full render pass over all selected images (between the first and last frame) run the provided config with 'render_only=True'.
- To render only the outputs of the static background node use 'bckg_only=True'
- for all dynamic parts set 'obj_only=True' & 'white_bkgd=True'
python main.py --config example_configs/config_kitti_0006_example_render.txt
Citation
@InProceedings{Ost_2021_CVPR,
author = {Ost, Julian and Mannan, Fahim and Thuerey, Nils and Knodt, Julian and Heide, Felix},
title = {Neural Scene Graphs for Dynamic Scenes},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {2856-2865}
}

 1.4k Dec 28, 2022
1.4k Dec 28, 2022
 34 Nov 09, 2022
34 Nov 09, 2022
 2 Oct 10, 2022
2 Oct 10, 2022
 530 Jan 04, 2023
530 Jan 04, 2023
 14 Aug 30, 2022
14 Aug 30, 2022
 3 Feb 15, 2022
3 Feb 15, 2022
 4 Dec 29, 2021
4 Dec 29, 2021
 2 Oct 07, 2022
2 Oct 07, 2022
 98 Dec 20, 2022
98 Dec 20, 2022
 64 Nov 27, 2022
64 Nov 27, 2022
 55 Dec 21, 2022
55 Dec 21, 2022
 630 Dec 28, 2022
630 Dec 28, 2022
 615 Dec 08, 2022
615 Dec 08, 2022
 115 Jan 02, 2023
115 Jan 02, 2023
 29 Nov 19, 2022
29 Nov 19, 2022
 131 Dec 31, 2022
131 Dec 31, 2022
 177 Dec 06, 2022
177 Dec 06, 2022
 654 Dec 26, 2022
654 Dec 26, 2022
 1 Nov 12, 2021
1 Nov 12, 2021