![]()
![]()
![]()
![]()



BoTorch is a library for Bayesian Optimization built on PyTorch.
BoTorch is currently in beta and under active development!
Why BoTorch ?
BoTorch
- Provides a modular and easily extensible interface for composing Bayesian optimization primitives, including probabilistic models, acquisition functions, and optimizers.
- Harnesses the power of PyTorch, including auto-differentiation, native support for highly parallelized modern hardware (e.g. GPUs) using device-agnostic code, and a dynamic computation graph.
- Supports Monte Carlo-based acquisition functions via the reparameterization trick, which makes it straightforward to implement new ideas without having to impose restrictive assumptions about the underlying model.
- Enables seamless integration with deep and/or convolutional architectures in PyTorch.
- Has first-class support for state-of-the art probabilistic models in GPyTorch, including support for multi-task Gaussian Processes (GPs) deep kernel learning, deep GPs, and approximate inference.
Target Audience
The primary audience for hands-on use of BoTorch are researchers and sophisticated practitioners in Bayesian Optimization and AI. We recommend using BoTorch as a low-level API for implementing new algorithms for Ax. Ax has been designed to be an easy-to-use platform for end-users, which at the same time is flexible enough for Bayesian Optimization researchers to plug into for handling of feature transformations, (meta-)data management, storage, etc. We recommend that end-users who are not actively doing research on Bayesian Optimization simply use Ax.
Installation
Installation Requirements
- Python >= 3.7
- PyTorch >= 1.7.1
- gpytorch >= 1.4
- scipy
Installing the latest release
The latest release of BoTorch is easily installed either via Anaconda (recommended):
conda install botorch -c pytorch -c gpytorch
or via pip:
pip install botorch
You can customize your PyTorch installation (i.e. CUDA version, CPU only option) by following the PyTorch installation instructions.
Important note for MacOS users:
- Make sure your PyTorch build is linked against MKL (the non-optimized version of BoTorch can be up to an order of magnitude slower in some settings). Setting this up manually on MacOS can be tricky - to ensure this works properly, please follow the PyTorch installation instructions.
- If you need CUDA on MacOS, you will need to build PyTorch from source. Please consult the PyTorch installation instructions above.
Installing from latest master
If you would like to try our bleeding edge features (and don't mind potentially running into the occasional bug here or there), you can install the latest master directly from GitHub (this will also require installing the current GPyTorch master):
pip install --upgrade git+https://github.com/cornellius-gp/gpytorch.git
pip install --upgrade git+https://github.com/pytorch/botorch.git
Manual / Dev install
Alternatively, you can do a manual install. For a basic install, run:
git clone https://github.com/pytorch/botorch.git
cd botorch
pip install -e .
To customize the installation, you can also run the following variants of the above:
pip install -e .[dev]: Also installs all tools necessary for development (testing, linting, docs building; see Contributing below).pip install -e .[tutorials]: Also installs all packages necessary for running the tutorial notebooks.
Getting Started
Here's a quick run down of the main components of a Bayesian optimization loop. For more details see our Documentation and the Tutorials.
- Fit a Gaussian Process model to data
import torch
from botorch.models import SingleTaskGP
from botorch.fit import fit_gpytorch_model
from gpytorch.mlls import ExactMarginalLogLikelihood
train_X = torch.rand(10, 2)
Y = 1 - (train_X - 0.5).norm(dim=-1, keepdim=True) # explicit output dimension
Y += 0.1 * torch.rand_like(Y)
train_Y = (Y - Y.mean()) / Y.std()
gp = SingleTaskGP(train_X, train_Y)
mll = ExactMarginalLogLikelihood(gp.likelihood, gp)
fit_gpytorch_model(mll)
- Construct an acquisition function
from botorch.acquisition import UpperConfidenceBound
UCB = UpperConfidenceBound(gp, beta=0.1)
- Optimize the acquisition function
from botorch.optim import optimize_acqf
bounds = torch.stack([torch.zeros(2), torch.ones(2)])
candidate, acq_value = optimize_acqf(
UCB, bounds=bounds, q=1, num_restarts=5, raw_samples=20,
)
Citing BoTorch
If you use BoTorch, please cite the following paper:
@inproceedings{balandat2020botorch,
title={{BoTorch: A Framework for Efficient Monte-Carlo Bayesian Optimization}},
author={Balandat, Maximilian and Karrer, Brian and Jiang, Daniel R. and Daulton, Samuel and Letham, Benjamin and Wilson, Andrew Gordon and Bakshy, Eytan},
booktitle = {Advances in Neural Information Processing Systems 33},
year={2020},
url = {http://arxiv.org/abs/1910.06403}
}
See here for an incomplete selection of peer-reviewed papers that build off of BoTorch.
Contributing
See the CONTRIBUTING file for how to help out.
License
BoTorch is MIT licensed, as found in the LICENSE file.










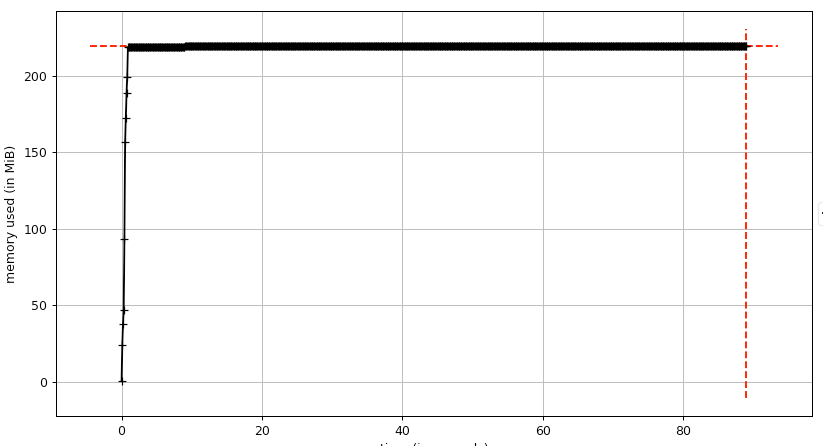
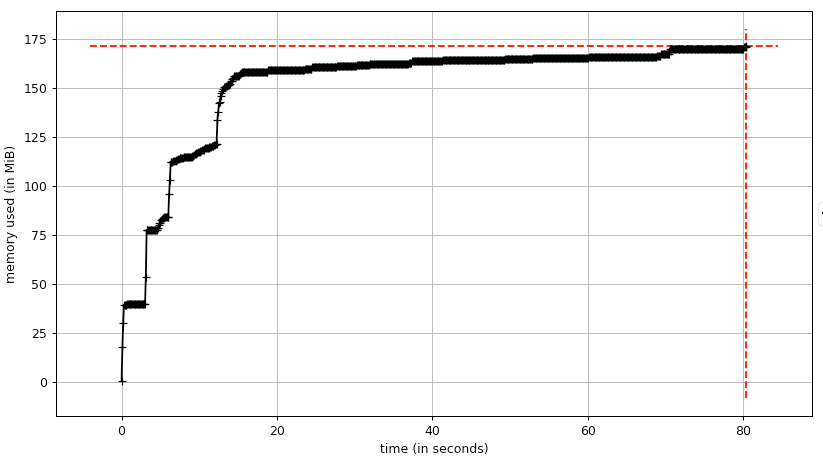
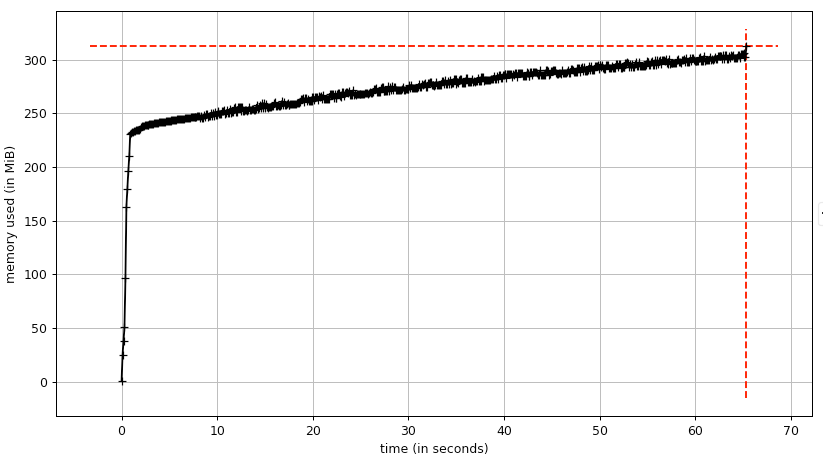
![[Bug] Possible memory leak in `botorch.optim.optimize_acqf`](https://avatars.githubusercontent.com/u/70196?v=4)




 4.8k Jan 07, 2023
4.8k Jan 07, 2023
 87 Jan 07, 2023
87 Jan 07, 2023
 10 Feb 10, 2022
10 Feb 10, 2022
 91 Jan 03, 2023
91 Jan 03, 2023
 3 Oct 29, 2022
3 Oct 29, 2022
 17 Nov 22, 2022
17 Nov 22, 2022
 13 Oct 03, 2022
13 Oct 03, 2022
 29 Dec 28, 2022
29 Dec 28, 2022
 115 Nov 21, 2022
115 Nov 21, 2022
 104 Dec 17, 2022
104 Dec 17, 2022
 298 Dec 10, 2022
298 Dec 10, 2022
 584 Dec 31, 2022
584 Dec 31, 2022
 94 Dec 23, 2022
94 Dec 23, 2022
 226 Jan 03, 2023
226 Jan 03, 2023
 79 Nov 25, 2022
79 Nov 25, 2022
 3 Dec 05, 2022
3 Dec 05, 2022
 183 Dec 19, 2022
183 Dec 19, 2022
 131 Oct 21, 2022
131 Oct 21, 2022
 20 Dec 02, 2022
20 Dec 02, 2022
 26 Nov 23, 2022
26 Nov 23, 2022