🆕
Are you looking for a new YOLOv3 implemented by TF2.0 ?
If you hate the fucking tensorflow1.x very much, no worries! I have implemented a new YOLOv3 repo with TF2.0, and also made a chinese blog on how to implement YOLOv3 object detector from scratch.
code | blog | issue
part 1. Quick start
- Clone this file
$ git clone https://github.com/YunYang1994/tensorflow-yolov3.git
- You are supposed to install some dependencies before getting out hands with these codes.
$ cd tensorflow-yolov3
$ pip install -r ./docs/requirements.txt
- Exporting loaded COCO weights as TF checkpoint(
yolov3_coco.ckpt)【BaiduCloud】
$ cd checkpoint
$ wget https://github.com/YunYang1994/tensorflow-yolov3/releases/download/v1.0/yolov3_coco.tar.gz
$ tar -xvf yolov3_coco.tar.gz
$ cd ..
$ python convert_weight.py
$ python freeze_graph.py
- Then you will get some
.pbfiles in the root path., and run the demo script
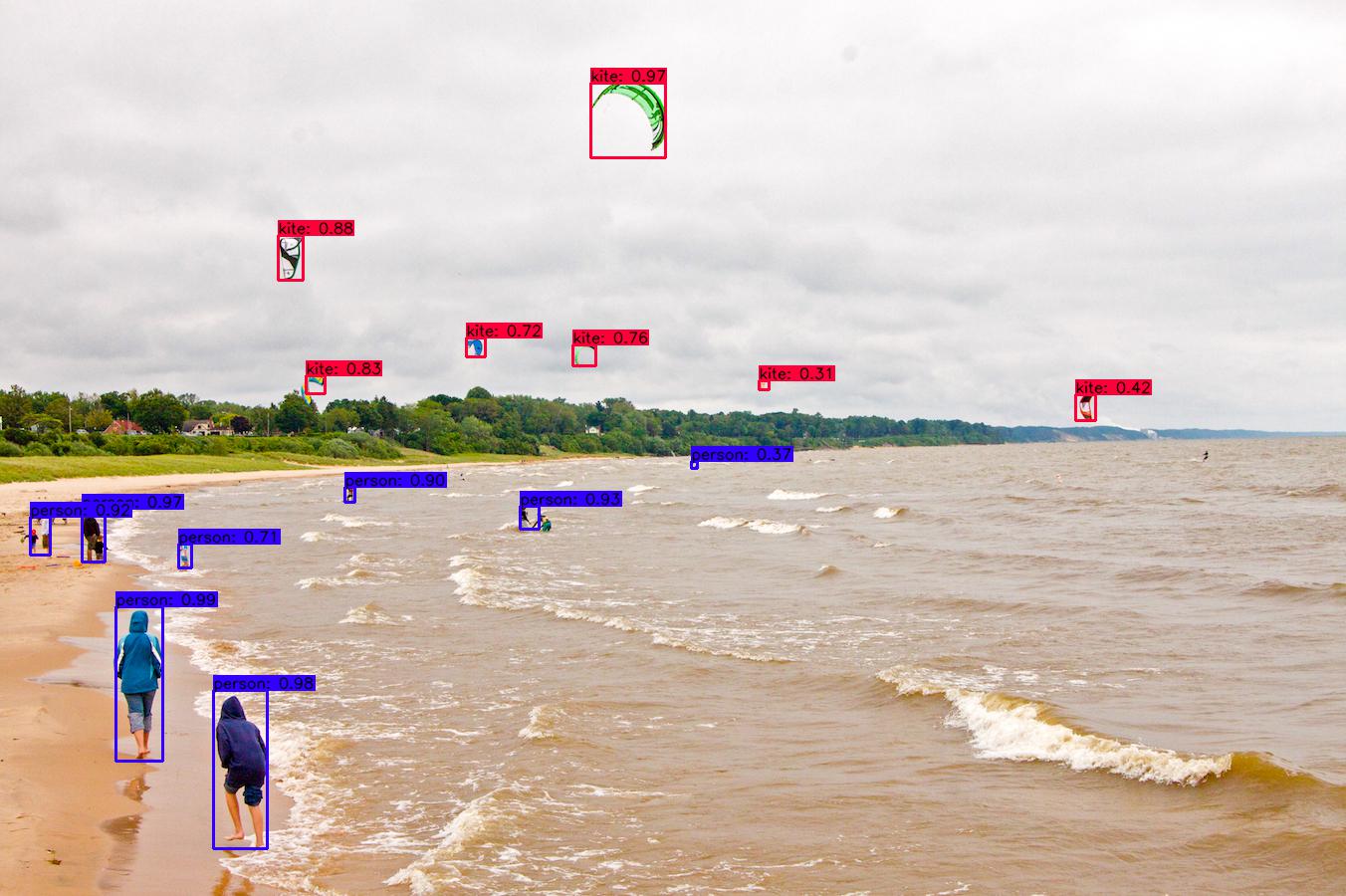
$ python image_demo.py
$ python video_demo.py # if use camera, set video_path = 0
part 2. Train your own dataset
Two files are required as follows:
xxx/xxx.jpg 18.19,6.32,424.13,421.83,20 323.86,2.65,640.0,421.94,20
xxx/xxx.jpg 48,240,195,371,11 8,12,352,498,14
# image_path x_min, y_min, x_max, y_max, class_id x_min, y_min ,..., class_id
# make sure that x_max < width and y_max < height
person
bicycle
car
...
toothbrush
2.1 Train on VOC dataset
Download VOC PASCAL trainval and test data
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtrainval_06-Nov-2007.tar
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2012/VOCtrainval_11-May-2012.tar
$ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtest_06-Nov-2007.tar
Extract all of these tars into one directory and rename them, which should have the following basic structure.
VOC # path: /home/yang/dataset/VOC
├── test
| └──VOCdevkit
| └──VOC2007 (from VOCtest_06-Nov-2007.tar)
└── train
└──VOCdevkit
└──VOC2007 (from VOCtrainval_06-Nov-2007.tar)
└──VOC2012 (from VOCtrainval_11-May-2012.tar)
$ python scripts/voc_annotation.py --data_path /home/yang/test/VOC
Then edit your ./core/config.py to make some necessary configurations
__C.YOLO.CLASSES = "./data/classes/voc.names"
__C.TRAIN.ANNOT_PATH = "./data/dataset/voc_train.txt"
__C.TEST.ANNOT_PATH = "./data/dataset/voc_test.txt"
Here are two kinds of training method:
(1) train from scratch:
$ python train.py
$ tensorboard --logdir ./data
(2) train from COCO weights(recommend):
$ cd checkpoint
$ wget https://github.com/YunYang1994/tensorflow-yolov3/releases/download/v1.0/yolov3_coco.tar.gz
$ tar -xvf yolov3_coco.tar.gz
$ cd ..
$ python convert_weight.py --train_from_coco
$ python train.py
2.2 Evaluate on VOC dataset
$ python evaluate.py
$ cd mAP
$ python main.py -na
the mAP on the VOC2012 dataset:

part 3. Other Implementations
-YOLOv3目标检测有了TensorFlow实现,可用自己的数据来训练
- Implementing YOLO v3 in Tensorflow (TF-Slim)












 27 Oct 06, 2022
27 Oct 06, 2022
 9 Dec 11, 2022
9 Dec 11, 2022
 141 Nov 21, 2022
141 Nov 21, 2022
 0 Sep 02, 2021
0 Sep 02, 2021
 514 Dec 23, 2022
514 Dec 23, 2022
 59 Nov 29, 2022
59 Nov 29, 2022
 2 Feb 15, 2022
2 Feb 15, 2022
 73 Oct 17, 2022
73 Oct 17, 2022
 66 Dec 14, 2022
66 Dec 14, 2022
 8 Sep 02, 2022
8 Sep 02, 2022
 175 Jan 07, 2023
175 Jan 07, 2023
 48 Nov 16, 2022
48 Nov 16, 2022
 86 Dec 25, 2022
86 Dec 25, 2022
 254 Jan 08, 2023
254 Jan 08, 2023
 1 Dec 17, 2021
1 Dec 17, 2021
 40 Dec 28, 2022
40 Dec 28, 2022
 42 Nov 10, 2022
42 Nov 10, 2022
 915 Jan 01, 2023
915 Jan 01, 2023
 7 May 26, 2022
7 May 26, 2022
 21 Nov 24, 2022
21 Nov 24, 2022