collision_risk_estimation
Collision risk estimation using stochastic motion models.
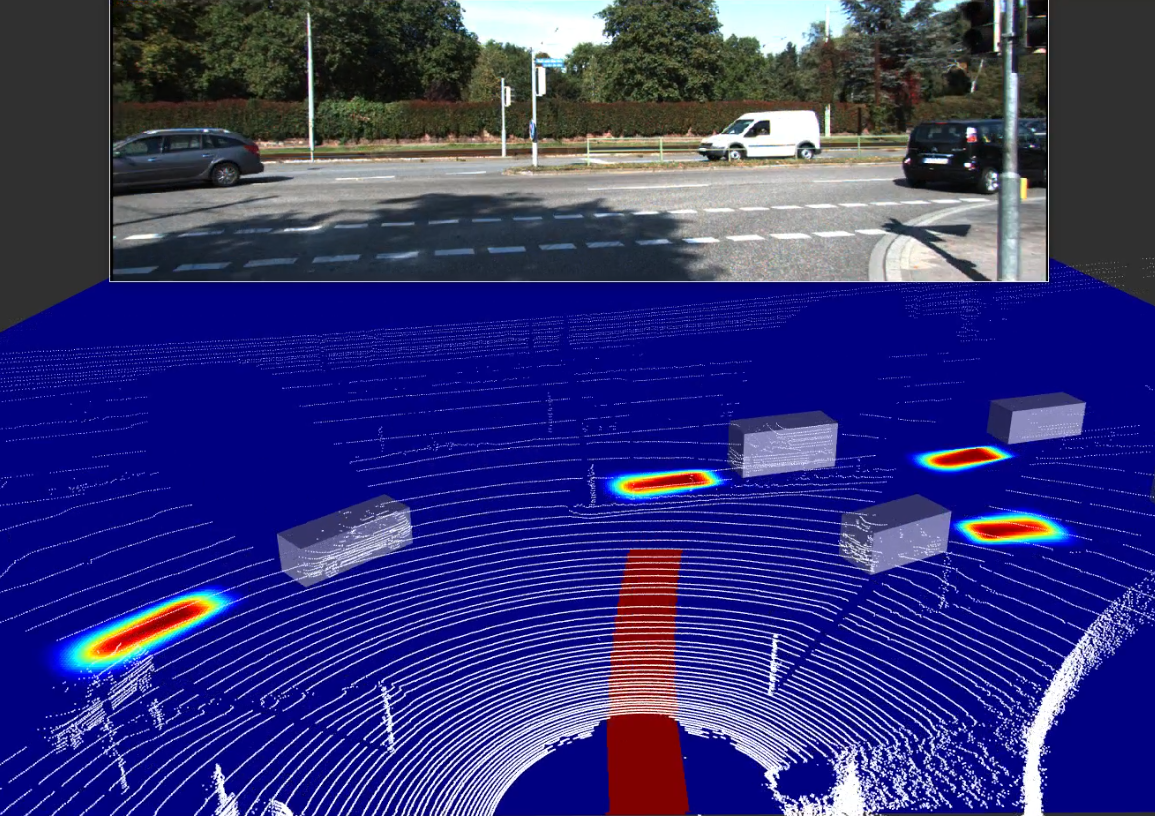
This is a new approach, based on stochastic models, to predict the future occupancy of vehicles and pedestrians. Our models only require tracked bounding box details and the class of the object from object detection method like Frustum-pointpillars, while uncertainties in sensing and prediction are captured within the stochastic nature of the models.
For more information, check out our paper: https://hal.inria.fr/hal-03416222
For installation instructions, follow installation.md
Some of the results that can be reproduced from this repository:
1. ros_node.py

2. orsp_carla.py

To cite the paper:
Unmesh Patil, Alessandro Renzaglia, Anshul Paigwar, Christian Laugier. Real-time Collision Risk Estimation based on Stochastic Reachability Spaces. ICAR 2021 - International Conference on Advanced Robotics, Dec 2021, Ljubljana, Slovenia. pp.1-6. hal-03416222

 937 Jan 04, 2023
937 Jan 04, 2023
 13 Oct 28, 2022
13 Oct 28, 2022
 11 Nov 21, 2022
11 Nov 21, 2022
 107 Dec 02, 2022
107 Dec 02, 2022
 0 Dec 07, 2022
0 Dec 07, 2022
 11.3k Dec 31, 2022
11.3k Dec 31, 2022
 3.9k Jan 05, 2023
3.9k Jan 05, 2023
 2 Feb 04, 2022
2 Feb 04, 2022
 7 Nov 14, 2022
7 Nov 14, 2022
 127 Jan 03, 2023
127 Jan 03, 2023
 2 Oct 10, 2022
2 Oct 10, 2022
 21 Jan 02, 2022
21 Jan 02, 2022
 44 Nov 04, 2022
44 Nov 04, 2022
 424 Jan 04, 2023
424 Jan 04, 2023
 57 Nov 24, 2022
57 Nov 24, 2022
 48 Sep 30, 2022
48 Sep 30, 2022
 386 Dec 05, 2022
386 Dec 05, 2022
 483 Jan 05, 2023
483 Jan 05, 2023
 2 Jan 10, 2022
2 Jan 10, 2022
 286 Dec 23, 2022
286 Dec 23, 2022