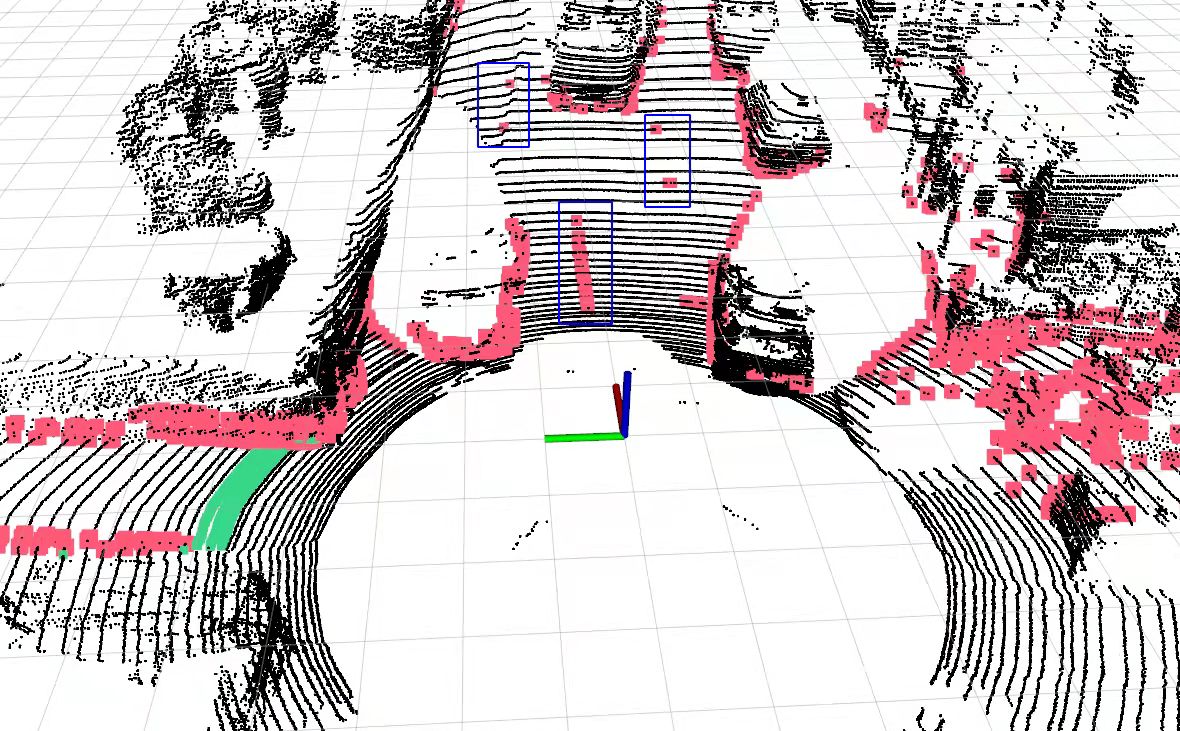
urban_road_filter: a real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles


Dependency
Install
Use the following commands to download and compile the package.
cd ~/catkin_ws/src
git clone https://github.com/jkk-research/urban_road_filter
catkin build urban_road_filter
Getting started
Cite & paper
If you use any of this code please consider citing the paper:
@Article{roadfilt2022horv,
title = {Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles},
author = {Horváth, Ernő and Pozna, Claudiu and Unger, Miklós},
journal = {Sensors},
volume = {22},
year = {2022},
number = {1},
url = {https://www.mdpi.com/1424-8220/22/1/194},
issn = {1424-8220},
doi = {10.3390/s22010194}
}
Realated solutions
- points_preprocessor
ray_ground_filterandring_ground_filter
Videos and images










 72 Nov 27, 2022
72 Nov 27, 2022
 13 May 01, 2022
13 May 01, 2022
 9 Dec 12, 2022
9 Dec 12, 2022
 35 Dec 26, 2022
35 Dec 26, 2022
 22 Dec 05, 2022
22 Dec 05, 2022
 367 Dec 22, 2022
367 Dec 22, 2022
 6 Jun 07, 2022
6 Jun 07, 2022
 37 Dec 16, 2022
37 Dec 16, 2022
 16 Nov 14, 2022
16 Nov 14, 2022
 26 Dec 13, 2022
26 Dec 13, 2022
 27 Mar 30, 2022
27 Mar 30, 2022
 139 Jan 01, 2023
139 Jan 01, 2023
 9 Nov 18, 2022
9 Nov 18, 2022
 20 Aug 17, 2022
20 Aug 17, 2022
 55 Dec 27, 2022
55 Dec 27, 2022
 2.1k Dec 30, 2022
2.1k Dec 30, 2022
 3 Apr 27, 2022
3 Apr 27, 2022
 1k Dec 06, 2022
1k Dec 06, 2022
 1.3k Dec 25, 2022
1.3k Dec 25, 2022
 7 Dec 01, 2022
7 Dec 01, 2022