Panoptic NeRF
Project Page | Paper | Dataset
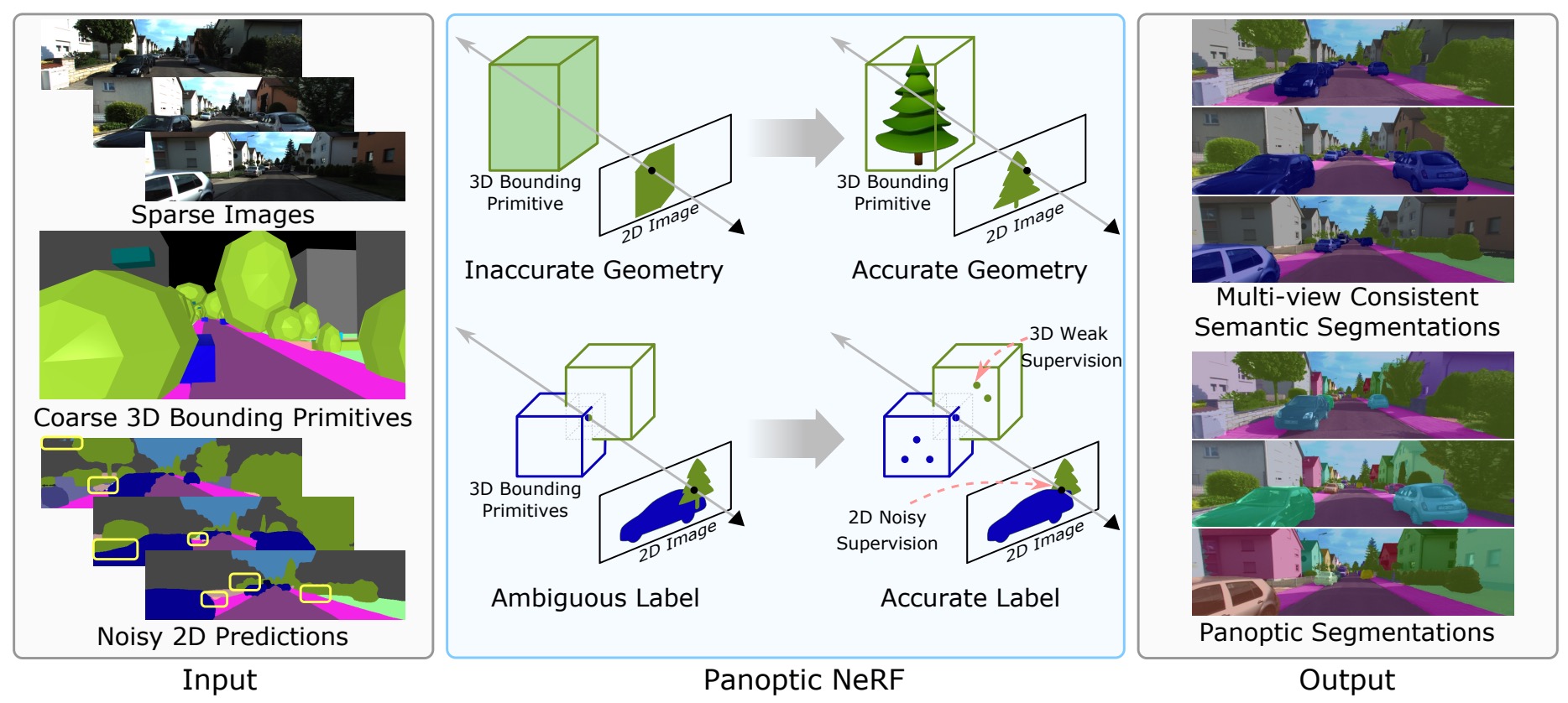
Panoptic NeRF: 3D-to-2D Label Transfer for Panoptic Urban Scene Segmentation
Xiao Fu*, Shangzhan zhang*, Tianrun Chen, Yichong Lu, Lanyun Zhu, Xiaowei Zhou, Andreas Geiger, Yiyi Liao
arXiv 2022
Installation
- Create a virtual environment via
conda.conda create -n panopticnerf python=3.7 conda activate panopticnerf - Install
torchandtorchvision.conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch - Install requirements.
pip install -r requirements.txt
Data Preparation
-
We evaluate our model on KITTI-360. Here we show the structure of a test dataset as follow. You can download it from here and then put it into
$ROOT(RGBs should query the KITTI-360 website).├── KITTI-360 ├── 2013_05_28_drive_0000_sync ├── image_00 ├── image_01 ├── bbx_intersection ├── *_00.npz ├── *_01.npz ├── calibration ├── calib_cam_to_pose.txt ├── perspective.txt ├── data_3d_bboxes ├── data_poses ├── cam0_to_world.txt ├── poses.txt ├── pspnet ├── sgm ├── visible_idfile Intro image_00/01stereo RGB images pspnet2D pseudo ground truth sgmweak stereo depth supervision visible_idper-frame bounding primitive IDs data_posessystem poses in a global Euclidean coordinate calibrationextrinsics and intrinsics of the perspective cameras bbx_intersectionray-mesh intersections, containing depths between hitting points and camera origin, semantic label IDs and bounding primitive IDs -
Generate ray-mesh intersections (
bbx_intersection/*.npz). The red dots and blue dots indicate where the rays hit into and out of the meshes, respectively. For the given test scene,START=3353,NUM=64.# image_00 python mesh_intersection.py intersection_start_frame ${START} intersection_frames ${NUM} use_stereo False # image_01 python mesh_intersection.py intersection_start_frame ${START} intersection_frames ${NUM} use_stereo True

- Evaluate the origin of a scene (
center_pose) and the distance from the origin to the furthest bounding primitive (dist_min). Then accordingly modify the.yamlfile.python recenter_pose.py recenter_start_frame ${START} recenter_frames ${NUM}
Training and Visualization
-
We provide the training code. Replace
resume Falsewithresume Trueto load the pretained model.python train_net.py --cfg_file configs/panopticnerf_test.yaml pretrain nerf gpus '1,' use_stereo True use_pspnet True use_depth True pseudo_filter True weight_th 0.05 resume False -
Render semantic map, panoptic map and depth map in a single forward pass, which takes around 10s per-frame on a single 3090 GPU. Please make sure to maximize the GPU memory utilization by increasing the size of the chunk to reduce inference time. Replace
use_stereo Falsewithuse_stereo Trueto render the right views.python run.py --type visualize --cfg_file configs/panopticnerf_test.yaml use_stereo False
-
Visualize novel view appearance & label synthesis. Before rendering, select a frame and generate corresponding ray-mesh intersections with respect to its novel spiral poses by enabling
spiral poses==Trueinlib.datasets.kitti360.panopticnerf.py.
Evaluation
├── KITTI-360
├── gt_2d_semantics
├── gt_2d_panoptics
├── lidar_depth
-
Download the corresponding pretrained model and put it to
$ROOT/data/trained_model/panopticnerf/panopticnerf_test/latest.pth. -
We provide some semantic & panoptic GTs and LiDAR point clouds for evaluation. The details of evaluation metrics can be found in the paper.
-
Eval mean intersection-over-union (mIoU)
python run.py --type eval_miou --cfg_file configs/panopticnerf_test.yaml use_stereo False
- Eval panoptic quality (PQ)
sh eval_pq_test.sh
- Eval depth with 0-100m LiDAR point clouds, where the far depth can be adjusted to evaluate the closer scene.
python run.py --type eval_depth --cfg_file configs/panopticnerf_test.yaml use_stereo False max_depth 100.
- Eval Multi-view Consistency (MC)
python eval_consistency.py --cfg_file configs/panopticnerf_test.yaml use_stereo False consistency_thres 0.1
News
12/04/2022Code released.29/03/2022Repo created. Code will come soon.
Citation
@article{fu2022panoptic,
title={Panoptic NeRF: 3D-to-2D Label Transfer for Panoptic Urban Scene Segmentation},
author={Fu, Xiao and Zhang, Shangzhan and Chen, Tianrun and Lu, Yichong and Zhu, Lanyun and Zhou, Xiaowei and Geiger, Andreas and Liao, Yiyi},
journal={arXiv preprint arXiv:2203.15224},
year={2022}
}
Copyright © 2022, Zhejiang University. All rights reserved. We favor any positive inquiry, please contact [email protected].

 80 Nov 20, 2022
80 Nov 20, 2022
 4.3k Jan 07, 2023
4.3k Jan 07, 2023
 4 Aug 23, 2021
4 Aug 23, 2021
 106 Dec 24, 2022
106 Dec 24, 2022
 1 Feb 11, 2022
1 Feb 11, 2022
 3.1k Dec 30, 2022
3.1k Dec 30, 2022
 114 Dec 27, 2022
114 Dec 27, 2022
 2 Aug 11, 2022
2 Aug 11, 2022
 2.6k Jan 08, 2023
2.6k Jan 08, 2023
 6 Jan 18, 2022
6 Jan 18, 2022
 1.9k Jan 03, 2023
1.9k Jan 03, 2023
 10 Nov 03, 2022
10 Nov 03, 2022
 44 Dec 10, 2022
44 Dec 10, 2022
 0 Nov 19, 2021
0 Nov 19, 2021
 106 Jan 09, 2023
106 Jan 09, 2023
 45 Feb 06, 2022
45 Feb 06, 2022
 3 Oct 26, 2022
3 Oct 26, 2022
 3 Jul 26, 2022
3 Jul 26, 2022
 49 Dec 22, 2022
49 Dec 22, 2022
 88 Nov 07, 2022
88 Nov 07, 2022