segmentation
TensorFlow implementation of ENet (https://arxiv.org/pdf/1606.02147.pdf) based on the official Torch implementation (https://github.com/e-lab/ENet-training) and the Keras implementation by PavlosMelissinos (https://github.com/PavlosMelissinos/enet-keras), trained on the Cityscapes dataset (https://www.cityscapes-dataset.com/).
-
Youtube video of results (https://youtu.be/HbPhvct5kvs):
-
-
The results in the video can obviously be improved, but because of limited computing resources (personally funded Azure VM) I did not perform any further hyperparameter tuning.

You might get the error "No gradient defined for operation 'MaxPoolWithArgmax_1' (op type: MaxPoolWithArgmax)". To fix this, I had to add the following code to the file /usr/local/lib/python2.7/dist-packages/tensorflow/python/ops/nn_grad.py:
@ops.RegisterGradient("MaxPoolWithArgmax")
def _MaxPoolGradWithArgmax(op, grad, unused_argmax_grad):
return gen_nn_ops._max_pool_grad_with_argmax(op.inputs[0], grad, op.outputs[1], op.get_attr("ksize"), op.get_attr("strides"), padding=op.get_attr("padding"))
Documentation:
preprocess_data.py:
- ASSUMES: that all Cityscapes training (validation) image directories have been placed in data_dir/cityscapes/leftImg8bit/train (data_dir/cityscapes/leftImg8bit/val) and that all corresponding ground truth directories have been placed in data_dir/cityscapes/gtFine/train (data_dir/cityscapes/gtFine/val).
- DOES: script for performing all necessary preprocessing of images and labels.
model.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: contains the ENet_model class.
utilities.py:
- ASSUMES: -
- DOES: contains a number of functions used in different parts of the project.
train.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: script for training the model.
run_on_sequence.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: runs a model checkpoint (set in line 56) on all frames in a Cityscapes demo sequence directory (set in line 30) and creates a video of the result.
Training details:
-
In the paper the authors suggest that you first pretrain the encoder to categorize downsampled regions of the input images, I did however train the entire network from scratch.
-
Batch size: 4.
-
For all other hyperparameters I used the same values as in the paper.
-
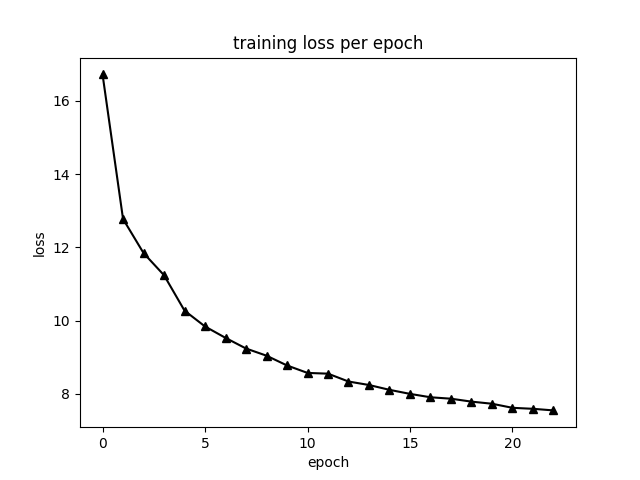
Training loss:
-
-
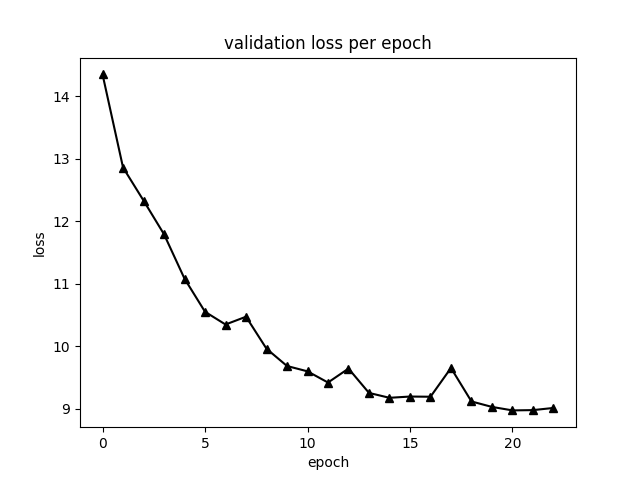
Validation loss:
-
-
The results in the video above was obtained with the model at epoch 23, for which a checkpoint is included in segmentation/training_logs/best_model in the repo.
Training on Microsoft Azure:
To train the model, I used an NC6 virtual machine on Microsoft Azure. Below I have listed what I needed to do in order to get started, and some things I found useful. For reference, my username was 'fregu856':
-
Download Cityscapes.
-
Install docker-ce:
-
- $ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
-
- $ sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
-
- $ sudo apt-get update
-
- $ sudo apt-get install -y docker-ce
-
Install CUDA drivers (see "Install CUDA drivers for NC VMs" in https://docs.microsoft.com/en-us/azure/virtual-machines/linux/n-series-driver-setup):
-
- $ CUDA_REPO_PKG=cuda-repo-ubuntu1604_8.0.61-1_amd64.deb
-
- $ wget -O /tmp/${CUDA_REPO_PKG} http://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/${CUDA_REPO_PKG}
-
- $ sudo dpkg -i /tmp/${CUDA_REPO_PKG}
-
- $ rm -f /tmp/${CUDA_REPO_PKG}
-
- $ sudo apt-get update
-
- $ sudo apt-get install cuda-drivers
-
- Reboot the VM
-
Install nvidia-docker:
-
- $ sudo dpkg -i /tmp/nvidia-docker*.deb && rm /tmp/nvidia-docker*.deb
-
- $ sudo nvidia-docker run --rm nvidia/cuda nvidia-smi
-
Download the latest TensorFlow docker image with GPU support (tensorflow 1.3):
-
- $ sudo docker pull tensorflow/tensorflow:latest-gpu
-
Create start_docker_image.sh containing:
#!/bin/bash
# DEFAULT VALUES
GPUIDS="0"
NAME="fregu856_GPU"
NV_GPU="$GPUIDS" nvidia-docker run -it --rm \
-p 5584:5584 \
--name "$NAME""$GPUIDS" \
-v /home/fregu856:/root/ \
tensorflow/tensorflow:latest-gpu bash
-
/root/ will now be mapped to /home/fregu856 (i.e., $ cd -- takes you to the regular home folder).
-
To start the image:
-
- $ sudo sh start_docker_image.sh
-
To commit changes to the image:
-
- Open a new terminal window.
-
- $ sudo docker commit fregu856_GPU0 tensorflow/tensorflow:latest-gpu
-
To stop the image when it’s running:
-
- $ sudo docker stop fregu856_GPU0
-
To exit the image without killing running code:
-
- Ctrl-P + Q
-
To get back into a running image:
-
- $ sudo docker attach fregu856_GPU0
-
To open more than one terminal window at the same time:
-
- $ sudo docker exec -it fregu856_GPU0 bash
-
To install the needed software inside the docker image:
-
- $ apt-get update
-
- $ apt-get install nano
-
- $ apt-get install sudo
-
- $ apt-get install wget
-
- $ sudo apt-get install libopencv-dev python-opencv
-
- Commit changes to the image (otherwise, the installed packages will be removed at exit!)

 889 Dec 30, 2022
889 Dec 30, 2022
 319 Dec 28, 2022
319 Dec 28, 2022
 2 Mar 19, 2022
2 Mar 19, 2022
 622 Jan 09, 2023
622 Jan 09, 2023
 213 Dec 14, 2022
213 Dec 14, 2022
 1 Feb 17, 2022
1 Feb 17, 2022
 1.5k Dec 31, 2022
1.5k Dec 31, 2022
 35 Dec 12, 2022
35 Dec 12, 2022
 64 Nov 11, 2022
64 Nov 11, 2022
 89 Jan 02, 2023
89 Jan 02, 2023
 1.6k Jan 08, 2023
1.6k Jan 08, 2023
 3 May 01, 2022
3 May 01, 2022
 599 Dec 23, 2022
599 Dec 23, 2022
 37 Dec 22, 2022
37 Dec 22, 2022
 162 Dec 16, 2022
162 Dec 16, 2022
 1.1k Jan 04, 2023
1.1k Jan 04, 2023
 28 Jan 03, 2023
28 Jan 03, 2023
 58 Dec 23, 2022
58 Dec 23, 2022
 28 Dec 16, 2022
28 Dec 16, 2022
 2 Oct 12, 2022
2 Oct 12, 2022