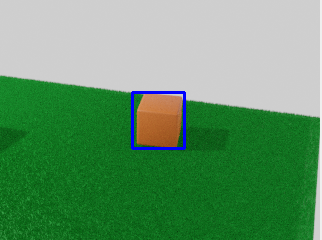
I've created this Blender scene where I have a dice, and I'm using ZPY to generate a dataset composed of images obtained by rotating around the object and jittering both the dice position and the camera. Everything seems to be working properly, but the bounding-boxes generated on the annotation file get progressively worse with each picture.
For example this is the first image's bounding-box:
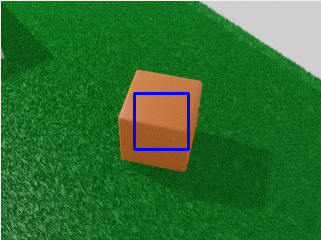
This one we get halfway through:
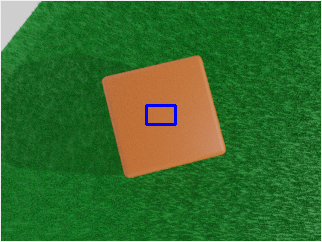
And this is one of the last ones:
This is my code (I've cut some stuff, I can't paste it all for some reason):
def run(num_steps = 20):
# Random seed results in unique behavior
zpy.blender.set_seed()
# Create the saver object
saver = zpy.saver_image.ImageSaver(description="Domain randomized dado")
# Add the dado category
dado_seg_color = zpy.color.random_color(output_style="frgb")
saver.add_category(name="dado", color=dado_seg_color)
# Segment Suzzanne (make sure a material exists for the object!)
zpy.objects.segment("dado", color=dado_seg_color)
# Original dice pose
zpy.objects.save_pose("dado", "dado_pose_og")
#Original camera pose
zpy.objects.save_pose("Camera", "Camera_pose_og")
# Save the positions of objects so we can jitter them later
zpy.objects.save_pose("Camera", "cam_pose")
zpy.objects.save_pose("dado", "dado_pose")
asset_dir = Path(bpy.data.filepath).parent
texture_paths = [
asset_dir / Path("textures/madera.png"),
asset_dir / Path("textures/ladrillo.png"),
]
# Run the sim.
for step_idx in range(num_steps):
# Example logging
# stp = zpy.blender.step()
# print("BLENDER STEPS: ", stp.num_steps)
# log.debug("This is a debug log")
# Return camera and dado to original positions
zpy.objects.restore_pose("Camera", "cam_pose")
zpy.objects.restore_pose("dado", "dado_pose")
# Rotate camera
location = bpy.context.scene.objects["Camera"].location
angle = step_idx*360/num_steps
location = rotate(location, angle, axis=(0, 0, 1))
bpy.data.objects["Camera"].location = location
# Jitter dado pose
zpy.objects.jitter(
"dado",
translate_range=((-300, 300), (-300, 300), (0, 0)),
rotate_range=(
(0, 0),
(0, 0),
(-math.pi, math.pi),
),
)
# Jitter the camera pose
zpy.objects.jitter(
"Camera",
translate_range=(
(-5, 5),
(-5, 5),
(-5, 5),
),
)
# Camera should be looking at dado
zpy.camera.look_at("Camera", bpy.data.objects["dado"].location)
texture_path = random.choice(texture_paths)
# HDRIs are like a pre-made background with lighting
# zpy.hdris.random_hdri()
# Pick a random texture from the 'textures' folder (relative to blendfile)
# Textures are images that we will map onto a material
new_mat = zpy.material.make_mat_from_texture(texture_path)
# zpy.material.set_mat("dado", new_mat)
# Have to segment the new material
zpy.objects.segment("dado", color=dado_seg_color)
# Jitter the dado material
# zpy.material.jitter(bpy.data.objects["dado"].active_material)
# Jitter the HSV for empty and full images
'''
hsv = (
random.uniform(0.49, 0.51), # (hue)
random.uniform(0.95, 1.1), # (saturation)
random.uniform(0.75, 1.2), # (value)
)
'''
# Name for each of the output images
rgb_image_name = zpy.files.make_rgb_image_name(step_idx)
iseg_image_name = zpy.files.make_iseg_image_name(step_idx)
depth_image_name = zpy.files.make_depth_image_name(step_idx)
# Render image
zpy.render.render(
rgb_path=saver.output_dir / rgb_image_name,
iseg_path=saver.output_dir / iseg_image_name,
depth_path=saver.output_dir / depth_image_name,
# hsv=hsv,
)
# Add images to saver
saver.add_image(
name=rgb_image_name,
style="default",
output_path=saver.output_dir / rgb_image_name,
frame=step_idx,
)
saver.add_image(
name=iseg_image_name,
style="segmentation",
output_path=saver.output_dir / iseg_image_name,
frame=step_idx,
)
saver.add_image(
name=depth_image_name,
style="depth",
output_path=saver.output_dir / depth_image_name,
frame=step_idx,
)
# Add annotation to segmentation image
saver.add_annotation(
image=rgb_image_name,
seg_image=iseg_image_name,
seg_color=dado_seg_color,
category="dado",
)
# Write out annotations
saver.output_annotated_images()
saver.output_meta_analysis()
# ZUMO Annotations
zpy.output_zumo.OutputZUMO(saver).output_annotations()
# COCO Annotations
zpy.output_coco.OutputCOCO(saver).output_annotations()
# Volver al estado inicial
zpy.objects.restore_pose("dado", "dado_pose_og")
zpy.objects.restore_pose("Camera", "Camera_pose_og")
Is this my fault or an actual bug?
- OS: Ubuntu 20.04
- Python 3.9
- Blender 2.93
- zpy: latest
bug











![KeyError: 'bpy_struct[key]: key](https://avatars.githubusercontent.com/u/1886347?v=4)



 18 Jan 11, 2022
18 Jan 11, 2022
 17 Dec 19, 2022
17 Dec 19, 2022
 212 Dec 17, 2022
212 Dec 17, 2022
 12.8k Jan 03, 2023
12.8k Jan 03, 2023
 95 Jan 05, 2023
95 Jan 05, 2023
 43 Dec 28, 2022
43 Dec 28, 2022
 169 Jan 05, 2023
169 Jan 05, 2023
 26 Dec 05, 2022
26 Dec 05, 2022
 334 Jan 08, 2023
334 Jan 08, 2023
 66 Dec 14, 2022
66 Dec 14, 2022
 40 Sep 28, 2022
40 Sep 28, 2022
 45 Oct 29, 2022
45 Oct 29, 2022
 9 Dec 17, 2022
9 Dec 17, 2022
 151 Jan 05, 2023
151 Jan 05, 2023
 26 Jan 03, 2023
26 Jan 03, 2023
 8 Jan 06, 2023
8 Jan 06, 2023
 1.8k Jan 07, 2023
1.8k Jan 07, 2023
 40 Dec 20, 2022
40 Dec 20, 2022
 1 Jun 05, 2022
1 Jun 05, 2022
 9 Feb 15, 2022
9 Feb 15, 2022