YOLOv5 in tesnorflow2.x-keras
- yolov5数据增强jupyter示例
- Bilibili视频讲解地址: 《yolov5 解读,训练,复现》
- Bilibili视频讲解PPT文件: yolov5_bilibili_talk_ppt.pdf
- Bilibili视频讲解PPT文件: yolov5_bilibili_talk_ppt.pdf (gitee链接)
模型测试
- 训练 COCO2017(val 5k)
- 检测效果
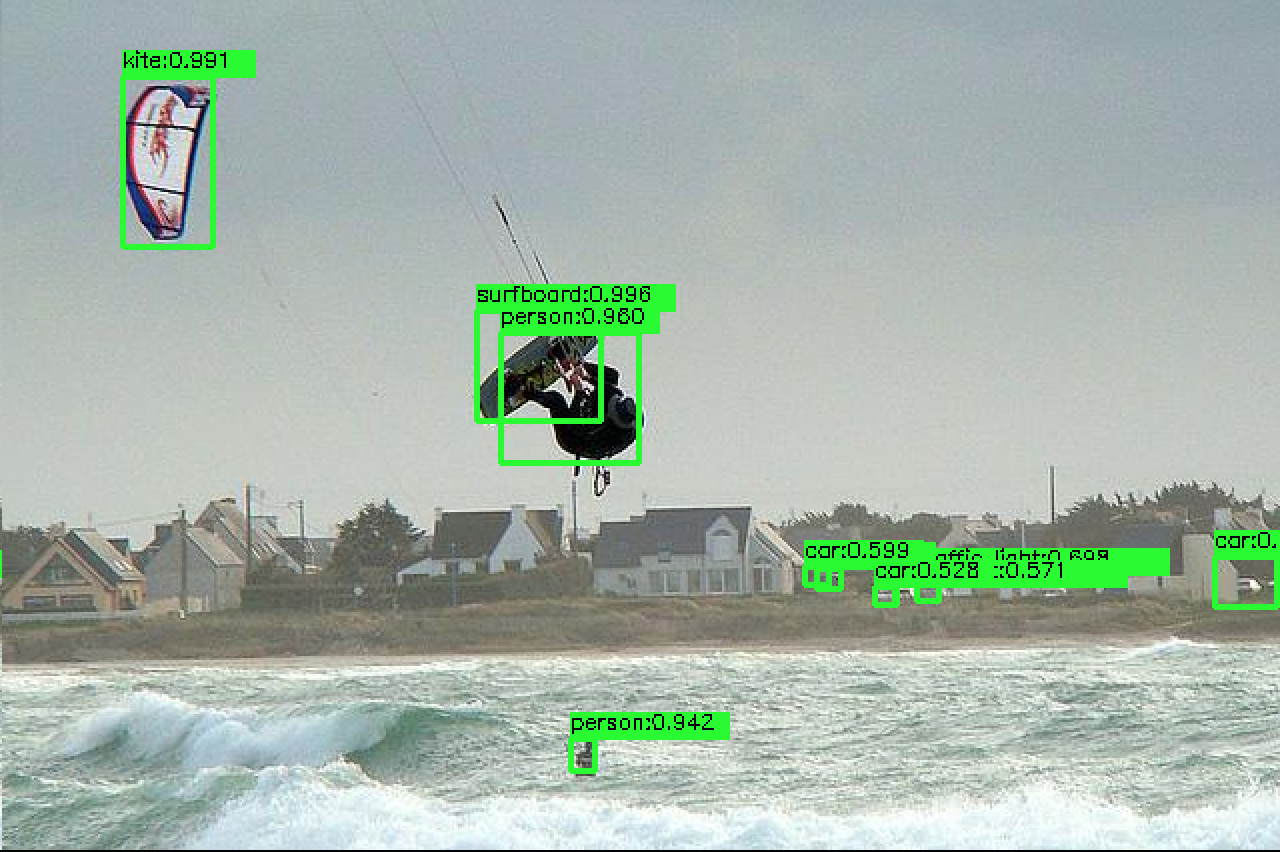


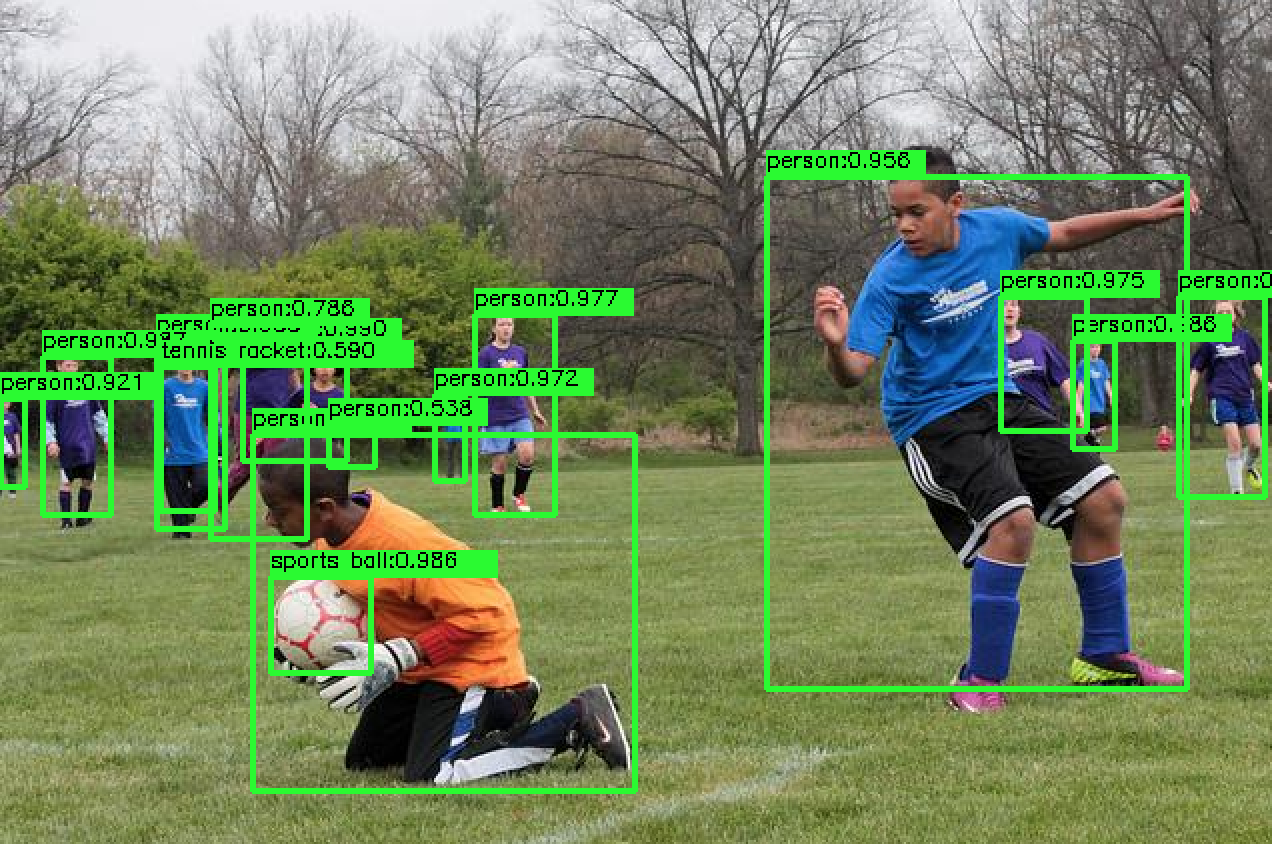
- 精度/召回率
Requirements
pip3 install -r requirements.txt
Get start
- 训练
python3 train.py
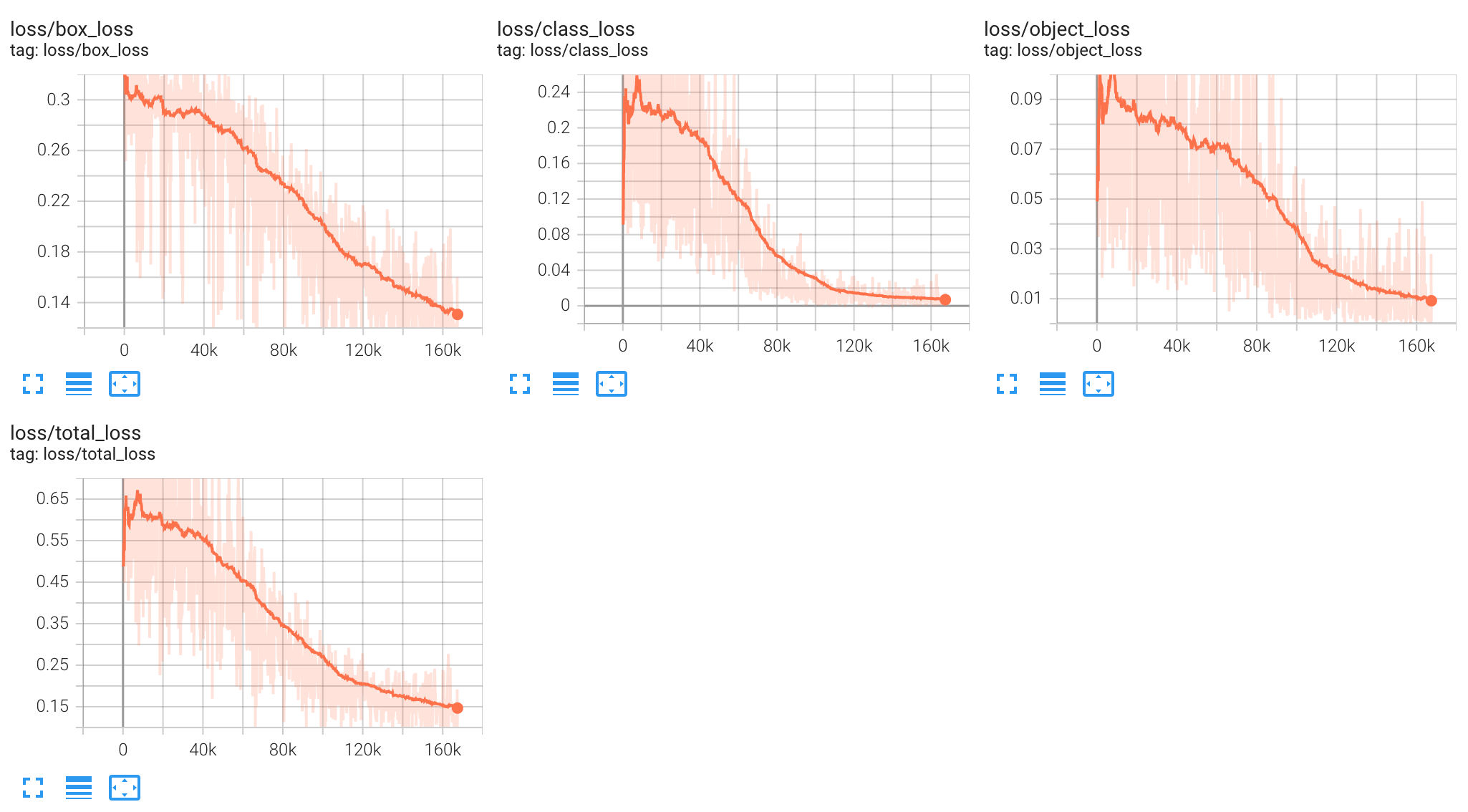
- tensorboard
tensorboard --host 0.0.0.0 --logdir ./logs/ --port 8053 --samples_per_plugin=images=40
- 查看
http://127.0.0.1:8053
- 测试, 修改
detect.py里面input_image和model_path
python3 detect.py
训练自己的数据
- labelme打标自己的数据
- 打开
data/labelme2coco.py脚本, 修改如下地方
input_dir = '这里写labelme打标时保存json标记文件的目录'
output_dir = '这里写要转CoCo格式的目录,建议建一个空目录'
labels = "这里是你打标时所有的类别名, txt文本即可, 每行一个类, 类名无需加引号"
- 执行
data/labelme2coco.py脚本会在output_dir生成对应的json文件和图片 - 修改
train.py文件中coco_annotation_file以及num_class, 注意classes通过CoCoDataGenrator(*).coco.cats[label_id]['name']可获得,由于coco中类别不连续,所以通过coco.cats拿到的数组下标拿到的类别可能不准. - 开始训练,
python3 train.py









 3 Nov 02, 2022
3 Nov 02, 2022
 258 Jan 07, 2023
258 Jan 07, 2023
 21 Dec 07, 2022
21 Dec 07, 2022
 217 Dec 05, 2022
217 Dec 05, 2022
 21 Oct 18, 2022
21 Oct 18, 2022
 273 Jan 03, 2023
273 Jan 03, 2023
 27 Dec 10, 2022
27 Dec 10, 2022
 32 Dec 26, 2022
32 Dec 26, 2022
 13 Aug 06, 2022
13 Aug 06, 2022
 51 Nov 17, 2022
51 Nov 17, 2022
 76 Dec 20, 2022
76 Dec 20, 2022
 9 Dec 14, 2022
9 Dec 14, 2022
 74 Dec 27, 2022
74 Dec 27, 2022
 15 Dec 18, 2022
15 Dec 18, 2022
 1 Apr 08, 2022
1 Apr 08, 2022
 18 Oct 12, 2022
18 Oct 12, 2022
 481 Jan 02, 2023
481 Jan 02, 2023
 1 Jan 16, 2022
1 Jan 16, 2022
 456 Nov 07, 2022
456 Nov 07, 2022
 19 Dec 01, 2022
19 Dec 01, 2022